Lenze Table Positioning V1/V2
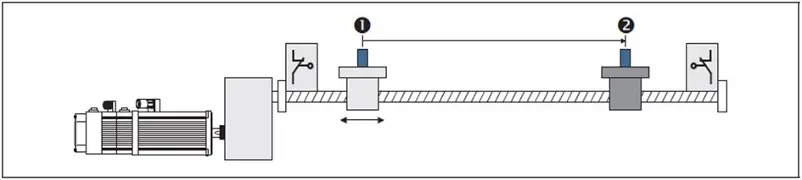
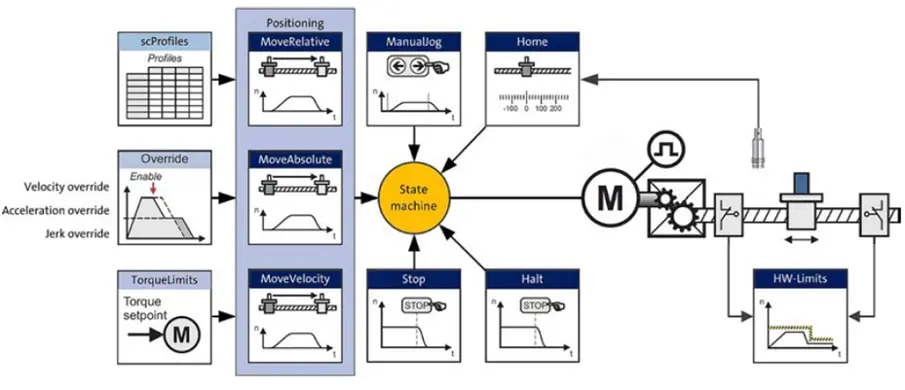
"Table Positioning" is a technology for precise positioning of objects in various systems, such as linear or rotary drives. This module allows the implementation of various positioning modes, such as relative and absolute positioning, manual mode (jogging), or working with a modulo measuring system. The technology is integrated into PLC-controlled systems, enabling flexible deployment in various industrial applications.
Key Features of the Module
1. Profile Management:
The module manages and transfers data on motion profiles necessary for precise movement. The profiles determine the maximum speed, acceleration, deceleration, and the final position to which the object is to be moved.
2. Relative and Absolute Positioning:
- Absolute positioning is based on a precise target position relative to a defined zero position. Before starting absolute positioning, it is necessary to define the home position (homing).
- Relative positioning takes into account the distance from the current position and is mainly used where it is necessary to move from one position to another without returning to the home position.
3. Manual Mode (Jogging):
Home Position (Homing): Before performing any absolute movement, it is necessary to define the system's zero position. The home position can be set automatically using predefined routines.
4. Home Position (Homing):
Before performing any absolute movement, it is necessary to define the system's zero position. The home position can be set automatically using predefined routines.
5. Modulo Measuring System (Unlimited Range of Motion):
This mode is designed for applications where the axis needs to perform continuous rotations (e.g., rotary tables). Absolute target positions can be exceeded, thus achieving effective positioning even in modulo systems.
6. Speed, Acceleration, and Jerk Control:
During the positioning process, it is possible to dynamically change parameters such as speed, acceleration, and jerk limit to ensure smooth positioning without unnecessary stress on the mechanical parts of the machine.
7. Diagnostics and Signaling:
The module provides detailed information about the current position, speed, errors, and warnings, which can be accessed by the operator via display and diagnostic tools.
Types of Movements and Modes
Table Positioning offers various movement modes:
- Absolute positioning: The axis moves to a specific absolute position, used in systems with a fixed reference position.
- Relative positioning: This mode focuses on moving a specific distance from the current position.
- Speed modes: In these modes, the axis reaches a constant speed without a fixed target position.
- Rotary systems (Modulo): For systems with rotary motion, this mode allows the reference position to be exceeded, effectively controlling continuous rotary applications.
Benefits and Applications
- Accuracy: It allows highly accurate control of movements, even in complex mechanical assemblies.
- Flexibility: Support for both linear and rotary systems makes this module suitable for various applications, including packaging, cutting, and assembly.
- Dynamic Adjustments: Enables real-time adjustments of speed and acceleration profiles.
Conclusion
The Table Positioning module from the FAST technology series offers robust and flexible solutions for precise positioning, whether for applications requiring relative or absolute positioning. Its wide functionality and support for various movement modes make it suitable for a wide range of industrial applications, such as assembly lines, robotics, machining tools, and other systems requiring precise movement.
For more technical details, including specific parameter values and diagnostic information, we recommend studying the attached complete technical manual for the module.
Comparisom Lenze Table Positioning V1/V2
- V1 (June 2019) focuses on basic functions for table positioning with profile data management, various positioning modes, and additional features such as manual control (jogging), homing, and following error monitoring.
- V2 (April 2021) extends the features of V1 with enhanced profile data management, the ability to change speed during operation, and more advanced positioning modes.
Posiotioning modes
- Version 1 supports basic positioning modes: absolute, relative, and velocity-based modes. The specification includes support for "touch probe positioning" to activate profiles after detecting a touch probe.
- Absolute positioning: The target position is defined absolutely relative to the zero point.
- Relative positioning: Movement over a relative distance from the current position.
- Velocity modes: Continuous motion with a defined speed.
- Version 2 improves these modes by adding more emphasis on fine-tuning acceleration and deceleration. Version 2 also provides more detailed control over speed and acceleration profiles and adds optimized modes for continuous motion and more precise control through software boundaries.
Profile Management
- Version 1: Basic profile management where up to 16 profiles can be stored. Each profile contains parameters like target position (lrPosition), maximum speed (lrVelocity), acceleration (lrAcceleration), and deceleration (lrDeceleration).
- Version 2 expands profile management with new parameters such as lrFinalVelocity, which allows the execution of the next profile without stopping after reaching the target position. Profile data also includes new windows for touch probes (lrTpWindowNeg and lrTpWindowPos), providing more precise probe detection within defined limits.
Additional Features
- Version 2 includes extended capabilities for speed restrictions and acceleration/deceleration control, offering greater control over movement during positioning.
- Version 1 was more basic and did not offer as many options for detailed speed and acceleration adjustments.
Error Reporting and Management
- Version 2 implements better error management with more detailed descriptions for the operator and support for faster problem resolution.
- Version 1 offers only basic error management and resetting, which may be less intuitive compared to later versions.
Conclusion
Version 2 provides more robust, precise, and flexible control compared to Version 1, making it the recommended choice for applications requiring high levels of dynamic control and monitoring. The changes in Version 2 reflect the needs of more demanding industrial applications, where precision and efficiency are crucial.
Start writing here...

